
Il vsore si compone di cinque parti:
– occhiali di ripresa con mini-telecamere orientabili
– computer di controllo e comando
– pulsantiera
– sensore
– batteria di accumulatori.
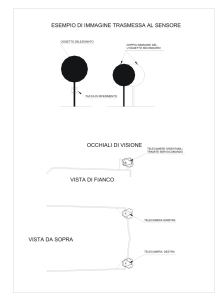
La scena viene ripresa da due mini-telecamere affiancate installate negli occhiali dell’operatore e montate su perni girevoli che ne consentono la rotazione sia in senso verticale che orizzontale tramite azionamenti elettrici asserviti al computer.
Il calcolatore riceve le immagini destra e sinistra in bianco e nero e le elabora accentuandone il contrasto fino a trasformarle in figure piene completamente bianche o completamente nere a seconda che la quantità di grigio di ognuna di esse sia superiore o inferiore alla soglia scelta dall’interessato,
All’interno dell’immagine si trova una tacca di riferimento che può essere spostata fino a sovrapporla all’oggetto prescelto.
A quel punto il calcolatore, memorizzato l’oggetto selezionato con la tacca, orienta su di esso ambedue le telecamere e provvede acchè tale orientamento venga mantenuto con continuità anche al verificarsi di spostamenti sia degli occhiali che dell’oggetto stesso. Ciò sarà facilitato dai movimenti dell’operatore che, a tale scopo, deve mantenere la direzione della visuale diretta approssimativamente verso l’oggetto stesso. Al centro della ripresa verrà quindi a trovarsi l’immagine stabile dell’oggetto, immagine che vi rimane fintantoché la tacca di riferimento non passi ad individuarne un altro.
Un’altra funzione svolta dal calcolatore è quella di definire, in base alla convergenza delle due telecamere, la distanza che intercorre da operatore ad oggetto. La convergenza, che sarà pari a zero per oggetto infinitamente lontano, aumenterà man mano che esso si avvicina fino a diventare massima per oggetto vicino. La distanza rilevata sarà trasmessa all’operatore mediante emissione di un segnale acustico di tono acuto per oggetti lontani e sempre più grave per quelli vicini.
La pulsantiera, manovrabile con una sola mano, comprende tre manopole: la prima, sferica, serve per muovere nelle due direzioni la tacca di riferimento in modo da poter individuare, come già detto, l’oggetto che interessa, la seconda, cilindrica, permette di modificare lo zoom delle telecamere e quello del calcolatore per poter ingrandire o rimpicciolire l’area ripresa, la terza, anch’essa cilindrica, per definire la soglia di grigio che l’operatore ritiene più adatta alla rappresentazione dell’oggetto.
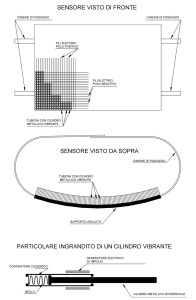
L’ultimo elemento è il sensore. E’ questa l’apparecchiatura che consente di far conoscere all’operatore l’immagine ripresa. E’ formato da un pannello leggermente arcuato delle dimensioni di circa 20 cm x 30 cm la cui superficie interna è interamente ricoperta da una miriade di minuscoli tubicini affiancati ognuno dei quali contiene un piccolissimo cilindro metallico spinto verso l’operatore da una molla ma che è in grado di arretrare e poi di ritornare avanti tramite un susseguirsi di impulsi elettrici trasmessi dal calcolatore ed addotti tramite una doppia fila di fili posti posteriormente ed a 90 gradi l’una rispetto all’altra. La vibrazione che si viene a creare può essere percepita avvicinando il sensore ad una parte sensibile del corpo (ad esempio fissando il sensore al ventre). In questi ultimi tempi si sono fatti avanzati studi e realizzato uno speciale elemento vibrante che potrà sostituire i cilindri descritti essendo composto da materiali piezoelettrici elettrodeformabili integrati a dei semiconduttori necessari per attivarli, per cui la costruzione del sensore diventerà abbastanza agevole. Se l’insieme dei cilindretti vibranti rappresenta una figura sarà possibile all’operatore percepirne la forma e l’estensione.
Le immagini dell’oggetto, riprese dalle due telecamere e trasformate dal calcolatore in corrispondenti figure in tutto nero o tutto bianco arrivano appunto al sensore sotto forma di zone vibranti aventi una configurazione simile alle parti nere.
Nel sensore si alterneranno ogni 10/20 secondi l’immagine ripresa dalla telecamera di destra con quella di sinistra in modo da trasmettere all’operatore ambedue le immagini. Logicamente se le due immagini saranno identiche (il che succede quando le due telecamere sono esattamente orientate sullo stesso oggetto) l’immagine sarà fissa.
In pratica l’utilizzazione dell’apparecchiatura avviene nel seguente modo.
All’inizio le telecamere, essendo posizionate a caso, invieranno due immagini completamente diverse tra di loro che si alterneranno ogni 10/20 secondi sul sensore. L’operatore, percepito dai cilindri vibranti alternativamente che non figura alcuna immagine fissa, con il pulsante di orientamento porterà la tacca di riferimento (anch’essa percepibile tramite cilindretti vibranti) sull’oggetto scelto. Il computer immediatamente orienterà su di esso le due telecamere mantenendole in tale direzione fintantoché l’oggetto medesimo continuerà ad essere selezionato dalla tacca di riferimento.
La situazione sarà allora la seguente: al centro del sensore sarà evidenziata una figura fissa che rappresenta l’oggetto principale mentre all’intorno ci saranno quelli più vicini e più lontani e che l’operatore può individuare in quanto costituiti da un alternarsi di figure semoventi. Nel caso lo desideri l’operatore può eliminare tali figure di contorno operando sullo zoom.
Contemporaneamente egli riceverà, tramite emissione di opportuno suono, la segnalazione della distanza in cui si trova l’oggetto.
Immaginiamo, ad esempio, che si voglia osservare una fila di alberi posti a distanza via via crescente rispetto all’operatore.
Definito con la tacca di riscontro il primo albero, sul sensore figureranno tanti alberi tra i quali solo il primo, essendo stato selezionato, avrà una immagine stabile, il secondo sarà invece raffigurato da un albero che ad intervallo di 10/20 secondi salta da destra a sinistra, il terzo subirà spostamenti maggiori, così pure il quarto e via via gli altri. Una volta presa dimestichezza sarà immediatamente percepibile l’oggetto che interessa e quindi sarà possibile affinarne la selezione mediante la pulsantiera. Da notare che l’immagine dell’albero selezionato è, in ogni caso, stabile in quanto sia l’operatore per quanto riguarda l’orientamento di massima e sia il calcolatore per quello di dettaglio, provvedono a mantenere le due telecamere puntate rigorosamente sull’oggetto. Anche la sensazione della distanza tramite adeguato suono in arrivo all’operatore, con la pratica diventa automatica.
Ovviamente le immagini, per poter essere correttamente interpretate, devono essere semplici e, a tale scopo, il calcolatore provvederà ad eliminare quelle di sfondo e di primissimo piano chiaramente definibili dal fatto che le figure gemelle che le costituiscono sono tra di loro tanto più distanziate quanto più sono lontane dall’oggetto principale. In pratica al sensore arriveranno soltanto l’immagine del soggetto selezionato che apparirà ferma e, sdoppiata e semovente, quella di alcuni oggetti posti nelle vicinanze. Queste ultime serviranno all’operatore per spostare man mano la visuale dall’una all’altro degli oggetti che gli si presentano davanti in modo da consentirgli, tramite la ripetizione dell’intero ciclo, di esaminare l’intera scena. Opportuni aggiustamenti dell’immagine potranno ottenersi alla pulsantiera mediante lo zoom che permette di riportarla alla grandezza desiderata e modificando la soglia di grigio il che permette di migliorare la qualità dell’immagine stessa.
Tornando all’esempio della fila di alberi, l’operatore, riceverà l’immagine del primo albero e quella, sdoppiata ed instabile, del secondo. Potrà allora selezionare quest’ultimo nel qual caso riceverà la sua immagine e quelle, sdoppiate, del primo e del terzo. Tramite la tacca di riferimento potrà allora spostarsi sul terzo, quindi sul quarto e così via fino ad esaminare l’intera fila. Opportuni aggiustamenti dello zoom gli permetteranno di avere gli alberi nella giusta grandezza mentre modificando la soglia dei grigi potrà migliorarne la rappresentazione al variare dei colori e della luce che illumina in realtà la scena.
Da rilevare come il comando di zoom agisca, del tutto automaticamente, con due distinte modalità. In prima fase sarà l’ottica delle telecamere a variare l’ampiezza del campo di ripresa, ma una volta giunta alla fine della corsa degli obbiettivi sarà l’elettronica ad intervenire nella variazione dell’immagine in bianco e nero elaborata dal computer. L’operatore potrà, a sua scelta, esaminare un oggetto nel suo insieme tramite una immagine panoramica oppure nei dettagli minuti ingrandendone una porzione dopo l’altra.
Particolarmente semplice diventa la lettura di testi stampati od anche scritti a mano nel qual caso l’operatore, seguendo con la tacca di riferimento via via le parole delle righe, si troverà a sentire le scritte in rilievo sulla pelle quasi si trattasse di testo scritto in caratteri Braille molto perfezionati. Allo stesso modo potrà scrivere di proprio pugno o tracciare linee e disegni seguendone man mano l’andamento.
Il visore per ciechi consente un’altra utilizzazione tanto utile da poter, essa sola, giustificare la realizzazione delle apparecchiature che lo compongono pur se complicate e costose . Si deve aggiungere che la procedura che viene quì proposta rappresenta una grande semplificazione di quelle prima indicate nel mentre i risultati che se ne possono ottenere sono senza dubbio validi e di più facile apprendimento per l’operatore. Si tratta di dare a chi è privo della vista, nientemeno che la possibilità di usare il personal computer con tutti i suoi svariati programmi applicativi come, ad esempio, quello per la scrittura di testi, la redazione di disegni o la compilazione di data base. Tale ambizioso risultato viene raggiunto utilizzando, fra le apparecchiature elencate,soltanto il sensore che va collegato direttamente al computer da tavolo. Quest’ultimo, ovviamente munito di appropriato programma applicativo, riproduce l’immagine del display, cui in questo caso non rimane che la funzione del tutto secondaria di consentire le operazioni di controllo e la manutenzione dei programmi da parte degli addetti, anche nel sensore dando modo all’utente non vedente di percepirla. Ad esempio in caso di battitura di testi, al momento in cui viene premuto un tasto, la relativa lettera o cifra numerica è riprodotta, notevolmente ingrandita, sulla parte sensibile del non vedente che può quindi leggere interi spezzoni di frase. Lo stesso accade nella esecuzione di grafici o disegni fatti alla tastiera dell’ordinatore, tramite un qualsiasi programma di grafica. La possibilità offerta dal computer di ingrandire a piacere una parte dell’immagine fà sì che sia possibile percepire anche i particolari minuti di dettaglio. Lo stesso dicasi per i testi che possono essere ingranditi a piacere. Inutile ribadire quali prospettive si aprano per i non vedenti dalla possibilità di usare il computer: basti pensare all’uso di Internet!
La costruzione di un prototipo dell’apparecchiatura descritta è tanto complessa da poter essere affrontata solo da una Società di ricerca che possa disporre di ingenti mezzi. Si pensi, per quanto concerne la parte meccanica, al sensore che comprende più di 100.000 cilindri vibranti, alle due mini-telecamere automatiche che devono essere munite di dispositivo di orientamento asservito al computer nonché di quello di definizione automatica delle distanze. Particolarmente complessa è la redazione del software di comando e controllo sia per quanto riguarda la parte grafica di riconoscimento, elaborazione e memorizzazione delle immagini, sia per quanto riguarda le automazioni del sensore e delle telecamere e sia, infine, per la determinazione delle distanze con emissione dei suoni necessari per la loro trasmissione all’operatore. Studi recenti hanno risolto efficacemente il problema dei cilindri vibranti che possono essere vantaggiosamente composti da materiali piezoelettrici elettrodeformabili integrati a dei semiconduttori necessari per attivarli.
Si allegano disegni che rappresentano schematicamente gli occhiali di visione, il sensore ed un esempio di rappresentazione di un oggetto nel mentre, per quanto riguarda la possibilità offerta al non vedente di poter utilizzare il computer da tavolo, non occorrono altre indicazioni oltre a quelle prima fornite, trattandosi di una metodologia classica per un normale uso del computer cui viene solo aggiunto un display del tutto particolare come il sensore a cilindri vibranti.
NOTA IMPORTANTE DELL’AUTORE. Da internet rilevo che l’Enea di Frascati ha recentemente costruito un apparecchio più semplice ma del tutto simile a quello sopra descritto. Risulta inoltre che Vania, una non vedente, lo usa sistematicamente. Cliccando sopra si può leggere una prima testimonianza, a mio avviso importantissima.
ESCI DA “ALTRATECNICA” E VAI AL MENU’ DI CERTI “MODI DI DIRE”