RACCONTO DI FANTASIA MA NON TROPPO
 Assembramento assurdo di automobili con motore a scoppio[/caption]
Assembramento assurdo di automobili con motore a scoppio[/caption]
IMPORTANTE ! LEGGERE :
LA STORIA VERA DI UNA AUTOMOBILE ELETTRICA RIVOLUZIONARIA
La realtà contemporanea sta registrando l’imminente arrivo di nuove automobili elettriche destinate in breve tempo a sostituire quelle con motore a scoppio. Si tratta di un cambiamento radicale ed assolutamente inevitabile per evidenti ragioni di protezione dell’ambiente dall’inquinamento dell’aria divenuta ormai irrespirabile e dalla rumorosità provocati da un traffico veicolare intensissimo, per questioni economiche inerenti l’elevato costo dei carburanti derivati dal petrolio o dal gas ed infine per il previsto esaurirsi di disponibilità dei carburanti stessi.
Da aggiungere che, non appena l’utilizzazione delle nuove auto elettriche avrà quella diffusione che esse meritano, il loro costo di costruzione diventerà molto più basso di quello delle attuali automobili con motore a scoppio per le notevoli semplificazioni costruttive dovute all’assenza di dispositivi complessi e costosi come il differenziale, il cambio, i sistemi di lubrificazione e di raffreddamento ecc. ecc. il cui costo di produzione supera di gran lunga quello dei nuovi dispositivi meccanici, elettrici ed elettronici. Si stima che il numero totale dei componenti della futura auto elettrica si ridurranno a n. 200 contro i 1400 di cui si compone una macchina di tipo attuale con motore a scoppio. L’ostacolo maggiore alla diminuzione del costo di una vettura elettrica è dovuto alle batterie ancora di tipo sorpassato e gravato da notevoli inconvenienti tra i quali risaltano gli elevati costo e ingombro e le difficoltà nella durata di utilizzazione e della loro carica elettrica ed infine nella breve vita delle batterie stesse. Il costo delle batterie è stimato in una percentuale che va dal 30% al 50% del costo totale della vettura. Le ricerche in corso porteranno di sicuro alla scoperta di accumulatori di tipo completamene diverso da quelli attuali come pure diverso potrà essere in futuro il sistema di rifornimento dell’energia elettrica che tenderà alla trasmissione aerea anche durante il moto della vettura e quindi alla evoluzione complessiva delle vetture individuali di cui tratto in questa nota.
Quella in argomento rappresenta una vera e propria rivoluzione che interesserà l’intero globo civilizzato per i molti vantaggi che presenta. Risultano già diffuse e circolanti su strada alcuni prototipi di automobili elettriche ma, a giudizio di chi scrive, assolutamente non congruenti con la innovazione che l’automobile elettrica richiede e che deve interessare tutti i componenti della nuova vettura e non soltanto, come accade nei citati prototipi già in circolazione, soltanto il propulsore. Gli esempi sono numerosi ma sarà sufficiente citare il sistema frenante che non deve assolutamente basarsi, come accade usualmente, sull’attrito fra due componenti della vettura e precisamente tra i ferodi composti da materiale particolarmente resistente all’usura e destinato a disperdere, trasformandola in calore, un non trascurabile quantitativo di energia ad alto costo ed i dischi in acciaio anch’essi sottoposti ad un grande sforzo puramente meccanico. Si vedrà nel prosieguo come, essendo l’energia elettrica il nuovo elemento di base, si deve assegnare ad essa tutte le operazioni da svolgere con asservimento al computer di bordo e sostituendosi in toto a quelle puramente meccaniche che attualmente sono fondamentali nelle vetture circolanti ed addirittura recuperando gran parte dell’energia della frenata stessa.
Nell’immaginare come dovrebbe essere la vettura ideale del domani la fantasia di chi sta scrivendo è corsa molto avanti fino ad arrivare a traguardi assolutamente irreali. Ad esempio io classificherei un errore madornale la attuale automobile considerando assolutamente da scartarne il modo banale di muoversi essendo dovuto ad un motore trogloditico e dispersivo come quello a scoppio, motore che per giunta trasmette alle ruote l’energia prodotta tramite apparecchiature del tutto meccaniche come il cambio, l’albero di trasmissione, il differenziale ed infine i quattro mozzi. Il mio sostituto avveniristico di una vettura così trogloditica immagina un mezzo nel quale le ruote sono sostituite da quattro sfere inserite nelle sedi cave e completamente in folle. Il moto di tale vettura avviene grazie ad un propulsore a reazione e di cui non so nemmeno figurarmi nulla ma soltanto che sarà in grado di dare una spinta al mezzo con possibilità decidere la direzione e la velocità: se indirizzata in avanti la vettura correrà in modo rettilineo, se laterale sarà impostata una curva, se all’indietro una frenata. Non mi dilungo in ulteriori particolari e passo invece a descrivere la mia vera soluzione anch’essa avveniristica ma con una bona possibilità di realizzazione.
Anche in questo caso l’impostazione di base non può che partire dalle modalità di moto ed in particolare dalla tipologia del nuovo motore e relativi accessori atti alla mobilità del mezzo.
 Il motore elettrico inserito nella ruota[/caption]
Il motore elettrico inserito nella ruota[/caption]
L’apparecchiatura di nuovo tipo che, per l’importanza che riveste, deve essere citata per prima riguarda il cuore, il fulcro della nuova automobile e cioè il motore, specificando subito un elemento essenziale ed innovativo: la nuova vettura dovrà essere dotata non di un solo motore elettrico oppure di soli due propulsori come fatto nei prototipi in circolazione bensì di quattro motori elettrici ognuno dei quali inserito nelle normali quattro ruote che pertanto assumono ciascuna un’autonomia totale pur restando tra di loro intimamente e razionalmente collegate tramite il sistema automatico di comando e controllo che dovrà sovrintendere in generale a tutte le apparecchiature , e per prime appunto alle ruote, essendo ogni elemento mobile della vettura regolato in funzione del compito che singolarmente o in collaborazione con tutti gli altri, deve svolgere.
Ognuno dei quattro motori di una stessa vettura dovrà essere compreso nello spessore della ruota, spessore che, a tale scopo, potrà anche assumere una maggiore dimensione sia nel diametro e sia nella larghezza rispetto alle auto d’oggi. La ruota avrà il pneumatico montato su un cerchione di grande raggio in modo da lasciare, verso il centro ruota, uno spazio il più grande possibile in cui poter alloggiare il motore elettrico perfettamente concentrico con la ruota stessa. Per ridurre gli inconveniente legati al fatto che le ruote rappresentano delle masse mobili verticalmente si dovranno ricercare dei motori leggeri adoperando tecnologie di rotazione e materiali di costruzione del tutto particolari e di basso peso proprio.
In ogni ruota che sia munita di un proprio propulsore, viene ad essere raggiunta una condizione particolarissima e completamente scevra dei numerosi collegamenti meccanici che attualmente vincolano pesantemente le ruote al resto della vettura. Basterà pensare quante e quanto complessi sono le seguenti funzioni prettamente meccaniche delle attuali vetture:
– quella della guida con il volante che avviene tramite collegamento pneumatico
– la trasmissione del moto rotatorio tra motore e ruote di trazione anteriori o posteriori tramite cambio delle marce, albero di trasmissione, differenziale ed infine mozzo della ruota
– il freno che richiede collegamenti pneumatici
 Motore ed accessori vari della nuova automobile elettrica[/caption]
Motore ed accessori vari della nuova automobile elettrica[/caption]
Ebbene tutti queste apparecchiature sono eliminate e sostituite tutte da collegamenti elettrici per l’immissione all’interno della ruota della corrente elettrica necessaria per farla ruotare mentre tutti i collegamenti di trasferimento dei segnali riguardanti le funzioni che deve svolgere la ruota come velocità di rotazione attorno al suo asse principale necessario per il moto, rotazione attorno all’asse verticale per le varie funzioni di guida, parcheggio, ammortizzazione ecc. possono essere trasmesse da computer a ruota mediante i comuni sistemi aerei ( Bluetooth, Wi-Fi ecc.).
In altre parole tutti i movimenti della ruota godono della massima libertà e soprattutto della correlazione con il computer di comando.
Una ruota come quella descritta è già in produzione da parte della ditta tedesca Shaeffler (vedi figura )
Queste le caratteristiche che, in questa versione puramente immaginaria, il motore e la ruota che lo comprende, dovranno assumere:
1. Ogni ruota ha il suo motore avente asse coincidente con l’asse ruota
2. nella parte radialmente estrema della ruota è presente un cerchione porta pneumatico collegato solidalmente con il rotore del motore elettrico e pertanto destinato a ruotare assieme ad esso.
3. il mozzo di asse ruota non gira su sé stesso e sostiene lo statore del motore elettrico anche esso non rotante ma solidalmente fissato alla carrozzeria portante.
4. la ruota deve svolgere le seguenti determinanti funzioni multiple. Provvedere al moto della vettura in avanti o all’indietro ed alle diverse velocità facendo girare il rotore ed il pneumatico ad esso collegato. Il moto sarà provocato dal campo magnetico rotante o da altra corrispondente modalità elettrica le cui caratteristiche comprendono la possibilità di passare automaticamente da velocità di rotazione pari a zero a quelle massime senza necessità di un cambio simile a quello in normale dotazione nelle vetture con motore a scoppio grazie alle vantaggiose proprietà dei motori elettrici di mantenere in ogni condizione di funzionamento un elevato valore di coppia ed inoltre di poter invertire su comando il senso di rotazione. La prima modalità assicura una elevata velocità di ripresa dovuta alle citate caratteristiche proprie dei motori elettrici. La seconda modalità, relativa alla inversione del senso di rotazione della ruota, ha luogo effettuando la stessa inversione del campo magnetico rotante, ed essa, oltre a permettere la marcia indietro dell’auto, consente di frenare la vettura anche nel caso di alta velocità. L’operazione è caratterizzata anche dal recupero dell’energia che il mezzo deve cedere per rallentare la propria corsa.
5. Consentire alla vettura di muoversi in moto rettilineo oppure in curva. Ogni ruota può anche girare attorno ad un asse verticale essendo asservita al sistema di telecontrollo telecomando : oltre ad assumere una posizione atta alla curva da effettuare, le due ruote esterne rispetto alla curva stradale girano a velocità razionalmente maggiorata rispetto alle altre due.
6. La ruota ha anche la possibilità di spostarsi in senso verticale sostituendosi interamente agli ammortizzatori presenti nelle auto di vecchio tipo ma essendo regolata in modo intelligente ed attivo dal telecontrollo. In pratica ogni irregolarità della pavimentazione sottostante alla ruota viene anticipatamente rilevata durante la normale corsa da un sensore elettronico e trasmessa al computer affinché regoli automaticamente le azioni da fare onde rimediare alle asperità del suolo ma non in modo passivo come accadeva con gli ammortizzatori bensì imponendo lo specifico movimento verticale della ruota in tempo reale. La possibilità di variazione in altezza della ruota può anche assume valori elevati dovendo svolgere, come sarà più avanti precisato, altre funzioni supplementari
7. Ognuna delle 4 ruote può girare a velocità razionalmente modulata in tempo reale dal computer di comando, velocità che può differenziarsi da quella delle altre tre ruote allo scopo di ottenere importanti vantaggi come una migliore stabilità, un consumo di energia più basso ecc. Ad esempio nelle curve stradali , oltre alla rotazione attorno l’asse verticale di tutte 4 le ruote in funzione dei movimenti del volante, viene impressa anche una velocità maggiore alle due esterne della curva rispetto a quelle interne. Anche in questo caso l’azione passiva oggi svolta dal differenziale, viene sostituita da una azione regolata intelligentemente dal computer di bordo. In caso di strada ghiacciata il computer ne terrà conto privilegiando le ruote senza ghiaccio.
8. Tutte le azioni della ruota sono definite dal computer e pertanto il conduttore non ha possibilità di agire direttamente come ad esempio accade nelle automobili oggi in uso nelle quali la frenata è data direttamente dalla pressione effettuata sul pedale del freno
9. ogni ruota sarà munita di strumentazione di misura in tempo reale della velocità di rotazione, dello spostamento verticale e della sua rotazione sull’asse verticale; il tutto per fornire al computer i dati necessari per le varie regolazioni intelligenti.
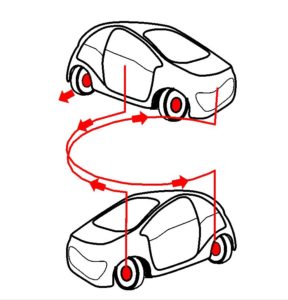
10. Ogni ruota può girare intorno all’asse verticale per un angolo che supera i 90 gradi allo scopo di poter eseguire anche azioni che esulano da quelle sopra descritte. Ad esempio per parcheggiare con una operazione automatica sul fianco stradale basterà fermate la vettura di fianco all’area di parcheggio ed il calcolatore, effettuata la rotazione delle ruote di 90° rispetto alla vettura, provvederà con un movimento singolo a spostarla lateralmente fino a parcheggiare nella mezzeria dello spazio libero oppure dello spazio segnato dalle righe bianche. Nel caso di parcheggio a spina di pesce o comunque di spazi posti fianco a fianco, bisognerà fermare l’auto con il muso rivolto verso lo spazio libero e quindi avrà luogo il parcheggio automatico con ruote in posizione normale Avendo ogni ruota la facoltà di ruotare attorno al suo asse verticale è possibile curvare anche in caso di piccolissimi raggi della curva stradale,
11. In casi estremi sarà possibile addirittura fare l’inversione di marcia della vettura facendola ruotare su sé stessa per un angolo di 180 gradi. In tal caso, dopo aver ruotato le quattro ruote di 90° rispetto alla posizione normale, le ruote anteriori avranno un senso di rotazione contrario a quello delle ruote posteriori per poter compiere agevolmente detta inversione a 180°
12. Essendo la vettura munita di sistema di regolazione dell’altezza rispetto al suolo, in caso di necessità di cambiare il pneumatico ad esempio a seguito di una foratura, il sistema consentirà di alzare la vettura stessa tramite manovra sulle altre tre ruote rendendo facile l’intera operazione di cambio ruota dall’inversione di marcia eseguita in spazi molto ristretti
 Un disegno della ditta Shaeffler (Germania) relativo alla possibilità di parcheggiare con ruote a 90° rispetto all’asse automobile[/caption]
Un disegno della ditta Shaeffler (Germania) relativo alla possibilità di parcheggiare con ruote a 90° rispetto all’asse automobile[/caption]
Terminata la la mia immagine fantasiosa, ma alla quale credo fermamente, del motore e delle quattro ruote che lo contengono assumendo il ruolo di organo meccanico principale, affronto il tema fondamentale e cioè quello dell’automobile considerata nel suo insieme funzionante in maniera razionale, economica, di grande sicurezza e comodità d’uso.
Parto dalla carrozzeria che non so immaginare se non come un contenitore funzionale e bello. Deve essere completamente diversa da quella tradizionale in quanto improntata sui seguenti scopi:
1. contenimento di una ingombrante e pesante serie di accumulatori da poter estrarre e sostituire comodamente
2. alloggiare con comodità quattro passeggeri ed il bagaglio
3. fornire su schermo tutte le immagini necessarie per la conoscenza della strada da percorrere e delle modalità di guida ottimali
4. tenere in conto la presenza di ruote con caratteristiche del tutto particolari in quanto di grandi dimensioni e libere di ruotare attorno a diversificati assi ed a muoversi in verticale
Passo ora alla spiegazione delle modalità di uso della vettura
La totalità dei comandi necessari e sufficienti per la guida sono effettuati tramite A) il volante e B) due pedali.
A) Il volante dirigerà la vettura lungo il percorso operando in maniera analoga alla guida delle attuali vetture ma con risultati totalmente diversi in quanto durante le curve di percorso saranno tutte e quattro le ruote a orientarsi razionalmente e con una funzione attiva predisposta dal computer come già indicato nella precedente spiegazione della ruota. Le innovazioni di guida riguardano la possibilità di effettuare curve anche molto strette essendo possibile, grazie alla rotazione di ogni ruota attorno al proprio asse verticale fino ai 100°. Un’altra notevole agevolazione riguarda le nuove possibilità di parcheggio che possono giovarsi di ruote disposte a 90° rispetto al normale assetto e quindi far muovere la vettura lateralmente e con possibilità di guidarla regolando opportunamente l’angolo di rotazione delle 4 ruote. (vedi figura)
B) Le funzioni svolte dai due pedali sono rispettivamente per il primo (acceleratore) quella di regolare la velocità di marcia in avanti oppure all’indietro dopo aver definito il senso di marcia tramite apposito pulsante elettrico. Non esiste il pedale della frizione né le leve del cambio in quanto l’avvio della marcia e la variazione di velocità in ogni motore elettrico è ottenuta semplicemente variando la corrente di alimentazione. In tale senso è da rilevare che esistono ai nostri giorni particolari apparati elettrici ed elettronici atti a ricostituire veri motori a velocità variabile a partire dalla velocità zero per arrivar a quella massima ‘mantenendo sempre un elevato valore di coppia.
Il secondo pedale ( freno ) riesce a rallentare la velocità delle ruote imponendo un campo magnetico rotante di verso contrario a quello di normale marcia ( oppure un corrispondente effetto di inversione del senso di rotazione ) che svolge contemporaneamente l’azione di riduzione della velocità e del ricupero dell’energia in esubero rispetto alle necessità di moto. Per dare un’idea il sistema di frenata è simile a quello delle barche a motore quando, per rallentare la corsa in acqua, si dà al motore e quindi all’elica il comando indietro tutta.
Una spiegazione da dare riguarda l’innovazione degli ammortizzatori che nelle attuali automobili consistono di particolari apparecchiature meccaniche a molla regolata le quali riescono ad attenuare gli sbalzi verticali della vettura . Si prevede di migliorare tale funzione imponendo alla ruota un movimento verticale definito in funzione della irregolarità della pavimentazione rilevata da appositi sensori e trasmessa al computer di bordo in tempo reale. Una apparecchiatura del genere una volta messa a punto dovrebbe migliorare notevolmente la corsa del veicolo fino ad arrivare, per assurdo, ad una andatura altimetricamente rettilinea anche in presenza di modeste discontinuità come sono normalmente quelle che caratterizzano le strade a passaggio veicolare. Si deve qui aggiungere che, se fossero veramente diffuse le auto elettriche di cui si parla, anche le pavimentazioni stradali dovrebbero essere studiate in modo da facilitare la corsa di vetture con i quattro motori inseriti nelle ruote con tutti i vantaggi che gli sono propri ma anche cercando di facilitare la risoluzione dei problemi dovuti alla presenza di notevoli masse poste all’interno di parti mobili come sono le ruote , masse che sono soggette a tutti gli sbalzi dovuti alle irregolarità stradali. In questo senso dovranno essere progettati motori ed apparecchiature accessorie molto leggere al fine di diminuire il peso totale delle masse mobili nel mentre quelle più consistenti cioè le batterie sono ovviamente alloggiate nella vettura stabilizzata dal sistema ammortizzante descritto.
La nota si conclude con la convinzione di un inesperto della materia come il sottoscritto ma convinto di avere tracciato una ipotesi di vettura del tutto immaginaria ma atta a sollecitare l’avvento di una vera automobile elettrica disconoscendo gli esempi attualmente messi in commercio senza alcuna speranza, confermata dai pochi esemplari elettrici oggi circolanti nelle nostre strade. Ovviamente il futuro riserverà innovazioni ben più avanzate di quelle qui indicate, come ad esempio la guida automatica. che richiederanno diversificazioni ulteriori rispetto a quanto immaginato e descritto, fermi restando i principi di base primo ttra tutti la totale congruenza della nuova vettura con il nuovo sistema di alimentazione interamente elettrico. Da non dimenticare la guida autonoma, che con la propulsione elettrica è il prossimo passo verso la nuova generazione di veicoli sia leggeri che pesanti.
Termino la mia descrizione con un’immagine del tutto teorica e cioè raggiungibile solo in parte ma che in questa sede è atta a dare un’immagine delle grandi possibilità supposte.
Io immagino la mia auto elettrica che percorre una strada orizzontale ma con pavimentazione con delle buche_ Ebbene ogni ruota, l’una indipendentemente dall’altra, come arriva all’inizio della buca viene spinta verso il basso da una estensione automatica e variabile del suo ammortizzatore estensione definita attimo per attimo e regolata intelligentemente per tutta la .lunghezza di ognuna delle buche che incontra. Ebbene per tutto il percorso la vettura non si è nemmeno accorta delle buche ma ha continuato ad avanzare in perfetta orizzontalità e senza scossoni. In altri termini la mia automobile è in grado di percorrere una strada accidentata come fosse perfettamente liscia.
Congratulazione: L’immaginazione è splendidamente geniale!
Talmente geniale che la sua indiscutibile fattibilità
sembra essere un ‘nuovo uovo di Colombo’!
E’ proprio vero: le più belle innovazioni nascono dai sogni!
Congratulazione: L’immaginazione è splendidamente geniale!
L’indiscutibile fattibilità sembra configurarsi
come un ‘nuovo uovo di Colombo’!
Si conferma ancora una volta:
le più belle innovazioni nascono dai sogni!
Luigi Pascucci
La cosa per mè essenziale à la diposizione dei 4 motori sulle ruote c masse pesanti no possono essere rotanti ma he è molto avversata in quanto si afferma che le masse rotanti devono essere ferme sulla carrozzeria portante. Io non sono di questo avviso in quanto bisogna evitare vibrazioni verticali costruendo motori molto leggeri ed inoltre eliminando le spinte verticali trasmesse dal motore su ruota tramite ammortizzatori attivi che esercitino delle spjnte verticali in funzione del rilievo continuativo del la pavimentazione nel punto antistante la ruota. XE ti interessa possiamo discuterne
Le cose non sono mai semplici. Ho ricevuto fondate critiche da specialisti i quali non ammettono una cosa per me fondamentale come l’aver inserito i 4 motori sulle ruote. Le vibrazioni verticali che le ruote trasmettono di sicuro all’abitato devono essere minimizzate tramite motori molto leggeri che penso in futuro saranno senz’altro possibili. Oltre a questo diventa molto importante la dotazione di ammortizzatori non statici come quelli attuali ma dinamici. In pratica deve essere rilevata in tempo reale l’andamento altimetrico del terreno subito davanti alla ruota e quando questa affronta la irregolarità deve essere spinta automaticamente e meccanicamente verso l’alto o il basso in modo che l’automobile mantenga altimetricamente come se la buca del terreno oppure il suo dosso, siano vinti da una corrispondente controspinta meccanica. In teoria la mia macchina viaggia in orizzontale anche in presenza di una strada piena di buche. Se vuoi possiamo parlarne. Saluti